




 Adam Kita
Adam Kita
O projekcie

03-10-2016 Strona robotlegus.pl jest już dostępna, a na niej pierwsza część kursu e-lerningowego z graficznego programowania.
20-10-2016 Pierwsza część kursu została zaktualizowana, druga część kursu jest już dostępna.
 Początki w świecie robotyki bywają trudne, trzeba się nauczyć tak wielu rzeczy, że nie wiadomo od czego zacząć.
Początki w świecie robotyki bywają trudne, trzeba się nauczyć tak wielu rzeczy, że nie wiadomo od czego zacząć.
Jednym z ważniejszych problemów jest programowanie. Niestety aby poprawnie programować w standardowych środowiskach bazujących na formie tekstowej należy znać składnię języka programowania, działanie algorytmów oraz sposób działania mikrokontrolera. Kolejnym istotnym problemem jest dobór elementów mechanicznych i elektroniki, z których zbuduje się robota oraz sama jego budowa. Ostatnim problemem według mnie bardzo istotnym, szczególnie dla najmłodszych konstruktorów jest w większości przypadków brak materiałów i oprogramowania w języku polskim. Uczęszczając wraz z moim kolegą Pawłem na zajęcia legionowskiego koła robotyki zauważyliśmy te problemy, postanowiliśmy im zaradzić. Tak powstała idea robota Leguś.

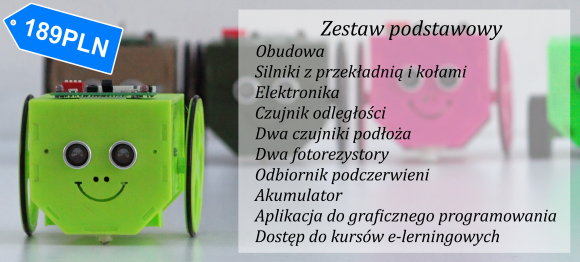
Robot Leguś jest niedrogim, edukacyjnym robotem o bardzo dużych możliwościach rozbudowy. Jego obudowa została tak zaprojektowana aby można ją było wykonywać przy użyciu drukarki 3d, frezarki CNC lub plotera laserowego. Taka technika produkcji nie wymaga ogromnych nakładów finansowych i umożliwia tworzenie obudów z różnych materiałów, w wielu różnych kolorach, bo przecież roboty nie muszą być nudne mogą mieć kolor inny niż biały czy czarny. Elektronika jest prosta, a mimo to umożliwia łatwą rozbudowę. Wyposażona jest w mikrokontroler Atmega328, sterownik silników DRV8835 (max. 1,2 A na silnik), konwerter USB-UART, generator wysokich dźwięków i ładowarkę akumulatorów. Oprócz płytki bazowej robot wyposażony jest w ultradźwiękowy czujnik odległości pozwalający na wykrycie przeszkód, czujniki odbiciowe pozwalające wykryć zmiany w podłożu dzięki czumu robot może śledzić linię lub utrzymywać się na ringu, fotorezystory pozwalają na określenie natężenia światła dzięki nim robot może podążać za światłem, dwie kolorowe diody nie są tylko dla bajeru, dzięki nim można określić stan robota, co znacznie ułatwia programowanie. Odbiornik podczerwieni pozwala sterować robotem za pomocą pilota. Projektując robota chciałem był on ogólnodostępny, wybrałem więc takie podzespoły aby robot miał jak największe możliwości przy zachowaniu niskiej ceny. Oprócz robota ważne jest środowisko programistyczne i tutaj mamy do wyboru klasyczne środowisko tekstowe Arduino IDE i graficzne Minibloq. Graficzne środowisko programistyczne jest idealne dla początkujących, ponieważ nie wymaga uczenia się składni na pamięć, każdy po przejściu krótkiego kursu e-lerningowego jest w stanie programować Legusia. Dla ułatwienia robot posiada wsparcie online, które będzie sukcesywnie rozwijane. Na stronie internetowej robota oprócz szczegółowej instrukcji budowy dostępne będą również cykl interaktywnych kursów e-lerningowych z programowania w środowisku minibloq.
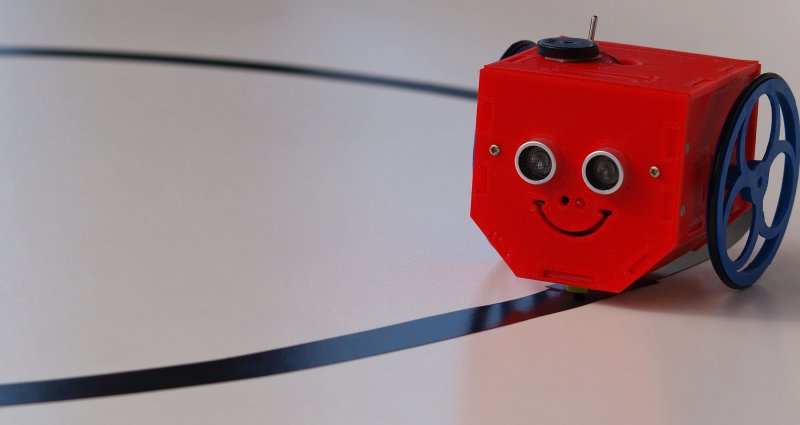 Na powyższym zdjęciu znajduje się robot zaprogramowany tak jeździł po linii.
Na powyższym zdjęciu znajduje się robot zaprogramowany tak jeździł po linii.
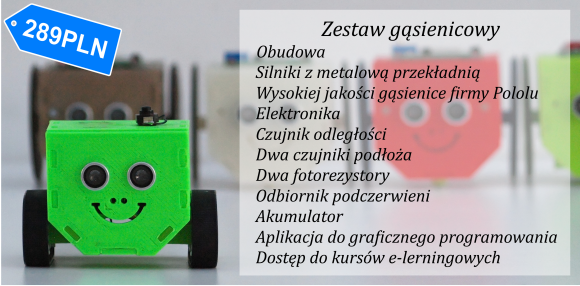
Leguś jako robot minisumo, czyli robot walczący z drugim robotem o utrzymanie się na ringu. Powyższy film pokazuje możliwości Legusia w wersji gąsienicowej.

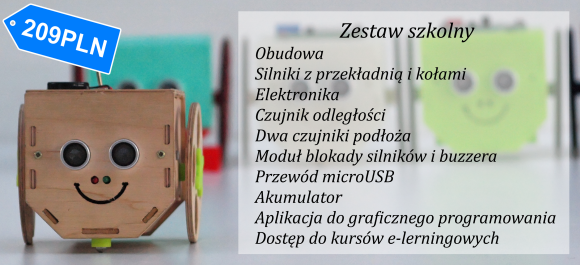
Wsparcie środowiska graficznego i tekstowego, dodatkowe moduły oraz kursy e-lerningowe powodują że platforma jest atrakcyjna zarówno dla początkujących jak i bardziej zaawansowanych konstruktorów. Z obsługą programu minibloq poradzą sobie nawet sześcio siedmio-latki o ile potrafią obsłużyć komputer i mają chęć do nauki. Dostępna jest także specjalna wersja dla szkół z możliwością blokady silników i buzzera w celu ułatwienia prowadzenia lekcji. W planach mam rozbudowę o zdalne zarządzanie robotów przez nauczyciela za pomocą pilota RC.

Od początku chciałem, aby Leguś mógł być pomocą szkolną, jednak obecny program nauczania zawiera tylko niewielkie elementy programowania. Na początku tego roku pojawił się pomysł zmian. Od zawsze na lekcjach informatyki brakowało mi uczenia się konkretnych rzeczy, za dużo było rysowania w paincie i nauki programów biurowych. Plan zmian jest ambitny, nie wiem czy zostanie należycie zrealizowany wiem natomiast, że poczynione zostały w tym kierunku poważne kroki. Od początku nowego roku szkolnego będzie realizowany autorski program pilotażowy tzn. szkoły które zgłoszą się do projektu będą mogły wprowadzić do programu nauczania elementy robotyki. Jedną z tych szkół jest szkoła do której uczęszczam, mój nauczyciel informatyki przeprowadzi wraz z jedną z klas zajęcia w oparciu o moje roboty. Podczas prowadzenia zajęć zauważyłem, że pierwszą rzeczą jaką chcą wszyscy zrobić jest sprawienie aby robot jeździł. Powoduje to duży zamęt i utrudnia prowadzenie lekcji, dlatego postanowiłem roboty przeznaczone dla szkół wyposażyć w blokadę silników. Na początku zajęć trzeba się zapoznać z oprogramowaniem i napisać parę prostych programów takich jak miganie diodą czy odczytywanie wartości z czujników. Gdy etap zajęć będzie pozwalał na wprowadzenie elementu ruchu blokada silników będzie zdejmowana.

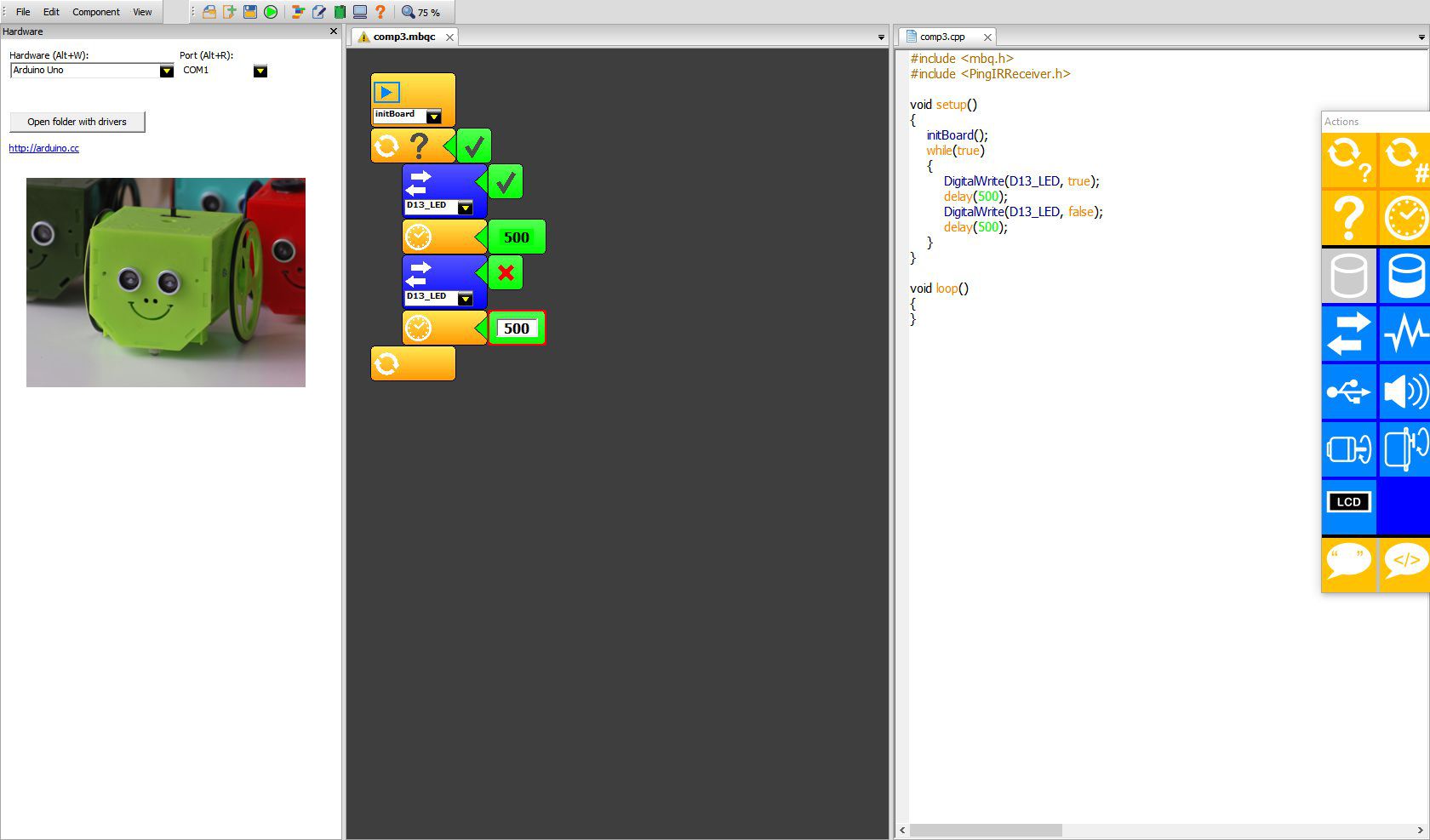
Do robota Leguś dołączone jest graficzne oprogramowanie minibloq, można również korzystać z oprogramowania tekstowego Arduino IDE lub dowolnego środowiska zgodnego z Arduino. Obsługa programu minibloq jest bardzo łatwa, polega na ułożeniu algorytmu czyli schematu działania robota z odpowiednich “bloków”- klocków. Tak jak na screenie poniżej. Interfejs programu jest w języku polskim co znaczenie ułatwia jego obsługę. Zapewniam wsparcie dla polskojęzycznej wersji programu miniBloq oraz jego rozbudowę o kolejne moduły. Oprócz języka interfejsu i zgodności z robotem istotne są również materiały szkoleniowe, dlatego na stronie robota będą sukcesywnie udostępniane kursy e-lerningowe. Są to kursy praktyczne, na ekranie wyświetla się nam obraz z programu minibloq i podążając za wskazówkami możemy stworzyć począwszy od najprostszych po coraz trudniejsze programy (algorytmy) dla naszego robota, ucząc się jednocześnie obsługi minibloq.

W obecnym momencie mam już bardzo zaawansowane prototypy zoptymalizowane pod produkcję seryjną, do wersji finalnej zastaną wprowadzone tylko kosmetyczne zmiany w elektronice robota. Ten projekt jest kontynuacją projektu o nazwie Legbot. Poprzedni projekt współtworzył ze mną Paweł Marcinkowski, niestety nie udało się nam zebrać odpowiedniej kwoty w wyznaczonym czasie. Od tamtego projektu roboty Leguś były używane na zajęciach kół robotyki, odbywały się także z nimi zajęcia w szkołach, niektóre z nich prowadziłem osobiście. Uczestniczyłem także w kilku ogólnopolskich wydarzeniach, na których prezentowałem te właśnie roboty i prowadziłem krótkie zajęcia. Zebrałem dużo pozytywnych opinii i wiele osób chciało kupić sobie własnego Legusia, postanowiłem więc kontynuować projekt. Osobiste prowadzenie zajęć z dziećmi i młodzieżą pozwoliło mi wychwycić niedoskonałości robota i je poprawić. Obecnie nawiązałem współpracę z producentem, który pomoże mi w produkcji i zajmie się dystrybucją robota, jednak muszę dostarczyć w pełni gotowy produkt. Robot jest już prawie gotowy, obecnie potrzebuję jeszcze przeprowadzić specjalistyczne badania oraz przebudować stronę internetową z kursami e-lerningowymi.

Jak już wspomniałem dostępne będą moduły rozszerzające możliwości robota. Dostępny jest już moduł gąsienic, który pozwala zamienić koła na gąsienice co pozwala m.in jeździć po nierównym podłożu. Moduł bluetooth umożliwiający sterownie robotem za pomocą smartfona, moduł z ośmioma diodami RGB który sprawi, że robot będzie jeszcze bardziej kolorowy, moduł płytki stykowej który pozwoli poznawać tajniki elektroniki poprzez tworzenie prostych obwodów. W przyszłości dostępne będą również inne moduły, mam już kilka pomysłów np. moduł wykrywacza metalu, moduł chwytaka, moduł do grania w piłkę, moduł wyświetlacza.

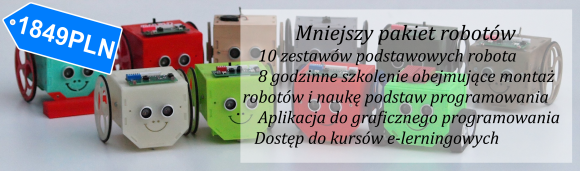
Ponieważ robot jest prawie gotowy, głównym celem projektu jest zebranie funduszy na zakup części z których składa się robot w ilościach hurtowych, co jest konieczne aby utrzymać jego niską cenę. Oprócz celu głównego mam jeszcze cele dodatkowe:
- Jeżeli uda mi się zebrać 150% zakładanej kwoty, powstanie dodatkowy kurs z programowania Legusia w środowisku Arduino IDE
- Jeżeli uda mi się zebrać 200% zakładanej kwoty, do każdego robota będzie dołączany moduł spychacza lub moduł wykrywacza metalu (do wyboru)
.






 Nazywam się Adam Kita, mam 17 lat. Interesuję się elektroniką i robotyką. Od 5 lat mam drukarkę 3d i frezarkę CNC, oczywiście umiem je obsługiwać. Jestem laureatem konkursu wydziału Mechatroniki Politechniki Warszawskiej. Współtworzyłem projekt Fokus One - kosmos w 3d który otrzymał nagrodę specjalną Plebiscytu Komputer Świat 2014 i jestem twórcą robotów Leguś które otrzymały 3 miejsce na zawodach Robomotion i 2 na Robomaticonie w kategorii feestyle.
Nazywam się Adam Kita, mam 17 lat. Interesuję się elektroniką i robotyką. Od 5 lat mam drukarkę 3d i frezarkę CNC, oczywiście umiem je obsługiwać. Jestem laureatem konkursu wydziału Mechatroniki Politechniki Warszawskiej. Współtworzyłem projekt Fokus One - kosmos w 3d który otrzymał nagrodę specjalną Plebiscytu Komputer Świat 2014 i jestem twórcą robotów Leguś które otrzymały 3 miejsce na zawodach Robomotion i 2 na Robomaticonie w kategorii feestyle.

Termin realizacji
Planuję wysyłać nagrody w tym roboty na przełomie listopada i grudnia. Nagrody zawierające kursy będą relizowane w indywidualnie ustalonym terminie.
Kontakt
- Poprzez stronę na facebooku https://www.facebook.com/legbot
- Mailowo a.kita282@gmail.com
Media o Twoim projekcie:
Krok w przyszłość
Adam Kita, uczeń Liceum Salezjańskiego w Legionowie, od kilku lat zajmuje się projektowaniem i budową robotów. Teraz marzy, aby w przyszłości znalazły się one na wyposażeniu szkół.
Robot Leguś
Adam Kita, 17 letni uczeń liceum z Legionowa, zbudował prototypy robota wielozadaniowego. Robot Leguś jest przeznaczony dla wszystkich chcących wkroczyć w cudowny świat robotyki. Różne jego wersje mają zaspokoić potrzebny poszczególnych grup wiekowych. Młody wynalazca stworzył także specjalną wersję dla szkół, dając nauczycielom pełną kontrolę nad robotem w trakcie zajęć. Zaletą i dużym ułatwieniem jest polski interfejs graficznego środowiska programowania oraz cykl interaktywnych kursów learningowych.